メンバーの研究紹介
Store and Forward (S&F) ミッションとは
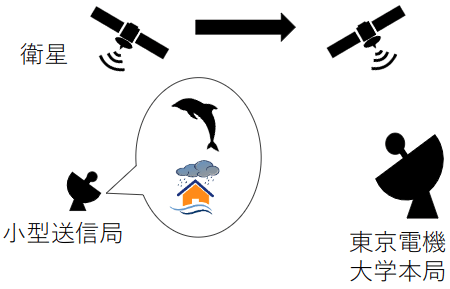
- 衛星を介したIoTミッション
- 地上の電波が届かない範囲に有効
研究背景
- 送信用の地上局に関して
- 様々な地点に大量に設置・・・コストの問題
- 誰でも簡単に持ち運び可能・・・可搬性の問題
研究目的
- コスト、可搬性の問題を、送信アンテナから解決
- 送信性能は従来と同等以上としました。
- 平面アンテナを使用します。
電源系の紹介
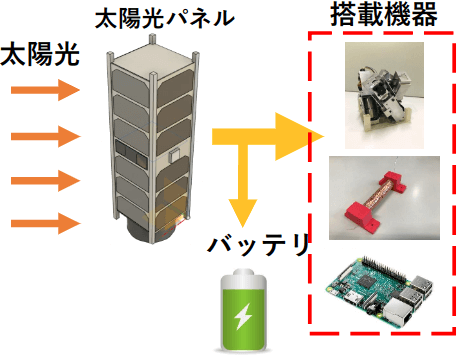
- HATOSATは太陽光パネルから電力を得ています。
- 得た電力はバッテリに充電されるか、搭載機器に供給されます。
- 電源系ではこれら一連の動作を行う制御回路を作成しています.
人工衛星の姿勢制御
- 別の姿勢に変更したりある姿勢を維持する機能(姿勢制御)が必要です。
- e.g.衛星が地上と通信をする時や,カメラで撮影する時など
コントロールモーメンントジャイロ(CMG)
磁気トルカ
- 超小型衛星の姿勢制御によく用いられる磁気トルカやリアクションホイールより高速な姿勢制御ができる。
- しかしCMGはもともと大型なため、超小型衛星にも搭載できるように小型のものを開発します。
- CMGを使用する際には磁気トルカも必要なため、HATOSATには両方搭載します。
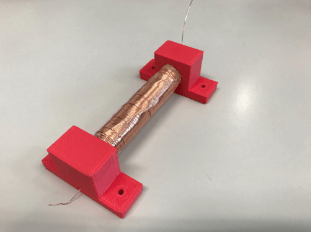
磁気トルカ
磁気トルカ
- 電磁石のようなもので、電流を流すことで発生した磁気と地球が発する磁場を利用して衛星の姿勢制御を行うものです。
- 方位磁針と原理は同じ
- 方位磁石の針が地球の北を指す原理と同様に、地球の磁場に磁気トルカを引き付ける形で姿勢制御を行います。
C&DH系
C&DH系は、姿勢制御系、カメラ、電源系、通信系などを監視、命令の指示、データ通信を行い、ミッションの遂行や地上との通信を行う、衛星の「頭脳」にあたるものです。
システム図
- 従来(Arduino)と異なりRaspberryPiで開発
- 宇宙環境下でも信頼性を損なわない
- 消費電力を抑える
CubeSatの搭載機器のサイズの最適化
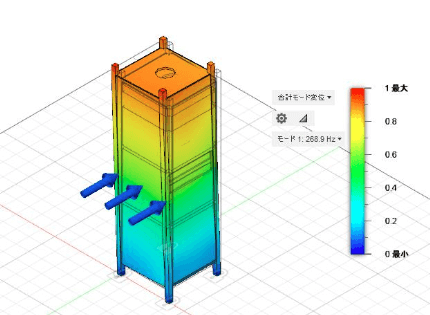
- 現在、CubeSatクラスにおいて、搭載機器のサイズの詳細な規格は制定されていません。
- 最適な構造や熱伝導率といったものを設定し、3UCubeSatの搭載機器の規格を統一することを目的とします。
- メリットとしては衛星の開発の短期化、最適な機器配置が可能になるということが考えられます。
- 図のように解析を行うことで打ち上げ時の振動や衝撃に耐えうる構造を設計することが目標です。